Misja CanSAT 2020
Budowa
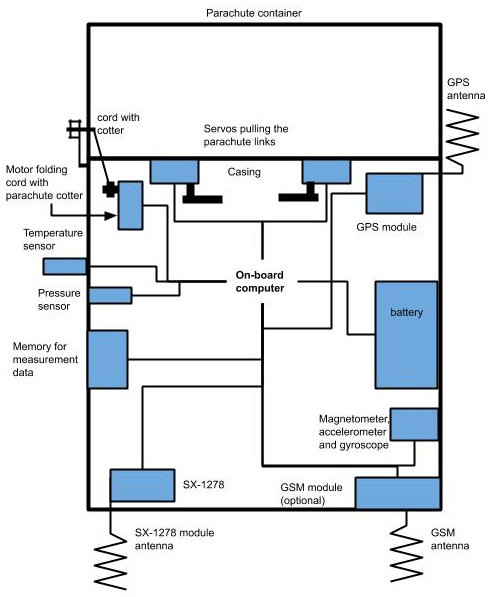
Podstawowymi komponentami naszego CanSATa umożliwiającymi wykonanie głównego zadania będą:
- spadochron szybujący (komorowy) własnej konstrukcji,
- moduł GPS do określania pozycji w przestrzeni 3D,
- magnetometr, akcelerometr i żyroskop do określania azymutu,
- czujniki temperatury i ciśnienia wymagane warunkami konkursowymi,
- czujnik (prawdopodobnie optyczny) do określenia, czy CanSAT opuścił swojego nosiciela (rakietę),
- mikrokontroler sterujący,
- dodatkowa pamięć Flash na dane,
- moduł komunikacyjny 433MHz,
- serwomechanizmy sterujące otwarciem spadochronu i jego kierowaniem.
Dane zebrane w czasie lotu będą przesyłane do stanowiska kontroli lotów za pomocą modułu 433MHz (wybrane dane) oraz zapisywane w pamięci Flash (wszystkie dane w celu odczytu po wylądowaniu). Stanowisko kierowania lotem oparte będzie o laptop, który zostanie wyposażony w moduł odbiorczy oraz antenę kierunkową, które umożliwi:
- obserwację w jakim trybie aktualnie satelita się znajduje (oczekiwanie na start, opuszczenie nosiciela, otwieranie spadochronu, lot w kierunku celu, lądowanie, tryb awaryjny czyli szybkie zmniejszanie wysokości, tryb sterowania ręcznego ze stanowiska kierowania lotem),
- śledzenie wszystkich parametrów przesyłanych przez satelitę,
- wymuszenie otwarcia spadochronu,
- wymuszenie włączenia trybu ręcznego sterowania i sterowanie satelitą,
- gromadzenie otrzymanych danych w plikach na komputerze.
Nasz CanSat ma za zadanie opadać, wykonywać pomiary i wylądować jak najbliżej określonego punktu. W celu określenia aktualnego położenia wykorzystujemy GPS’a. Do dokładniejszego ustalenia informacji takich jak azymut, prędkość, przyspieszenie, orientacja itp. wykorzystamy akcelerometr, magnetometr i żyroskop.
Do komunikacji między satelitą, a stacją naziemną wykorzystamy moduły LoRa SX-1278. W celu wypełnienia misji podstawowej użyjemy czujników temperatury i ciśnienia. Dane temperatury, ciśnienia, położenia itp. będziemy zapisywali w zewnętrznej pamięci. Ważniejsze informacje (np. położenie, temperatura, ciśnienie) będziemy na bieżąco wysyłać drogą radiową do stanowiska kierowania lotem.
Wstępnie założyliśmy, że dokładność lądowania CanSATa powinna być wyznaczona kołem o promieniu 20m od celu, dlatego też zastosujemy GPS o dokładności 2,5m. Taki obszar lądowania uznajemy za sukces misji. Niemniej jednak im mniejsza będzie wysokość, z której nasz CanSAT zostanie zrzucony, tym mniejsza będzie szansa na dolecenie do celu, stąd w czasie startów każdorazowo będziemy określać, co uznajemy za sukces w danym locie. Dodatkowo po dopracowaniu algorytmu autonomicznego lotu, chcemy zmienić kształt pola lądowania z koła na prostokąt o znacznie mniejszej powierzchni, ponieważ określając na bieżąco kierunek wiatru będziemy chcieli spowodować, by CanSAT zawsze lądował pod wiatr co zmniejszy jego prędkość względem ziemi.
Więcej o misji znajdziesz w tematach:
Projektowanie
Testowanie
Loty konkursowe
Prace przy naszym satelicie na bieżąco możesz śledzić na:
Nasz blog
Nasz fanpage Facebook